Математическая модель неустановившегося движения судна
Основным уравнением задачи в этом случае является уравнение второго закона Ньютона в проекции на ось координат “X”.
m*a = F(1)
Здесь:
m – масса тела;
а = dV/dt – ускорение тела;
F – сумма всех сил, действующих на судно, в проекции на ось “X”.
Равнодействующая сила F складывается из двух сил:
R – сопротивление движению судна;
Т – тяга движения (как правило, гребного винта).
Из физических соображений понятно, что сопротивление R зависит от скорости движения (чем больше скорость “V”, тем больше сопротивление R) и направлена против скорости “V”, т.е. в отрицательном направлении оси “X”. Тяга, создаваемая гребным винтом, также зависит от скорости судна, но действует в противоположном направлении силе сопротивления R, т.е. направлена в положительном направлении оси “X”.
С учетом сказанного, уравнение (1) можно записать в виде:
![]() (2)
(2)
Таким образом, получено обыкновенное дифференциальное уравнение 1-го порядка относительно скорости движения судна “V”.
Для определения пройденного за время “разгона” пути “S” к этому уравнению (2) необходимо добавить уравнение dS/dt=V, являющееся определением понятия – “скорость”. Таким образом, математической моделью задачи считается система из двух дифференциальных уравнений 1-го порядка, записанных в каноническом виде:
 (3)
(3)
Здесь функции R(V) и T(V) являются заданными и находятся по испытаниям моделей судна и гребного винта. Как правило, эти функции задаются либо графически, либо таблично.
На рис. 1 представлены типичные кривые функций R(V) и T(V).
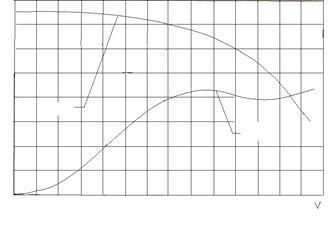
Рис. 1 - Буксировочные кривые сопротивления и тяги
Для решения системы уравнений (3) необходимо задать начальные условия. Обычно они задаются в виде t=0 или V=VN.
Еще о транспорте:
Экономический раздел
Основными показателями экономической эффективности внедрения новой техники являются: капитальные вложения, необходимые для осуществления мероприятия; себестоимость и рентабельность продукции; срок окупаемости капитальных вложений (или соответствующие коэффициенты эффективности – обратная величина с ...
Организация проектирования промышленных предприятий
Создание объекта строительства (новое строительство, реконструкция, техническое перевооружение) осуществляется в непрерывном инвестиционном процессе с момента возникновения идеи (замысла) до сдачи объекта в эксплуатацию. Регламентирующим документом, определяющим взаимоотношения между участниками ин ...
Подготовка данных к разработке планировочного решения АТП
Для определения площади главного производственного корпуса, состава и площадей других зданий и сооружений выполняется группировка зон, цехов, складов и вспомогательных помещений по месту их расположения на плане АТП, данные результаты сводятся в таблицу 8. Таблица 8 – Группировка объектов ПТБ по ме ...
Главное Меню
- Главная
- Транспорт и туризм
- История развития кораблестроения
- Транспортная травма
- История спортивного автомобилестроения
- Двигатель автомобиля
- Пассажирские перевозки
- Информация