Расчет заданных сборочных единиц
Определение основных размеров
Выбор ходовых колес крана
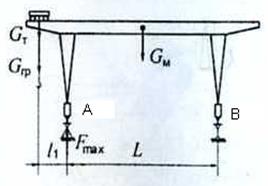
Рисунок 4 Схема к определению максимальной нагрузки на колесо.
![]() , (4.1)
, (4.1)
где GМ – вес крана; GТ – вес тележки:
![]() , (4.2)
, (4.2)
где Gкаб – вес кабины, Gкаб =14кН:
![]() ,
,
![]() .
.
Приводное колесо: двухребордное, D = 500мм, исполнение 1. К2РП-500-1ОСТ 24.09-75
Неприводное: К2РН-500ОСТ 24.09-75. Тип рельса: Р43
Выбранный рельс проверим по условию:
![]() , (4.2.1)
, (4.2.1)
где В – ширина дорожки катания колеса, В=100мм [1]; b – ширина головки рельса, b = 70мм.
![]() ,
,
Условие 4.2.1 выполняется.
Проверка колеса по напряжению смятия при точечном контакте, МПа:
![]() , (4.3)
, (4.3)
где [σN] – допускаемое напряжение при приведенном числе оборотов N за срок службы; К – коэффициент, зависящий от отношения радиуса закругления головки рельса R к диаметру поверхности катания колеса,
К = 0,119[1]; Кτ - коэффициент, учитывающий влияние тангенсальной нагрузки на напряжения в контакте, Кτ = 1,1[1] ; КД – коэффициент динамичности:
![]() , (4.4)
, (4.4)
где аж – коэффициент, зависящий от жесткости кранового пути, аж=0,2[1].
![]() ,
,

![]() , (4.5)
, (4.5)
где [σ0] – допускаемое напряжение, [σ0] =700МПа, Сталь 50[1] ;
![]() , (4.6)
, (4.6)
где Nс –полное число оборотов колеса за срок службы:
![]() , (4.7)
, (4.7)
где vс – усредненная скорость передвижения колеса, м/с:
![]() , (4.8)
, (4.8)
где β - коэффициент зависящий от отношения времени неустановившегося движения tн, к полному времени передвижения t, β =0,8[1]; Т – машинное время работы колеса, ч, за срок службы, Т=3200ч; v – коэффициент приведенного числа оборотов, принимают в зависимости от отношения
![]() , (4.9)
, (4.9)
Значение Fmin определяется расчетом для случая, когда тележка без груза находится у противоположной опоры крана:
![]() , (4.10)
, (4.10)
![]() ,
,
![]() ,
,
тогда v = 0,3 [1].
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Условие 4.3 выполняется.
Выбор ходовых колес грузовой тележки
![]() , (4.11)
, (4.11)
где Кн – коэффициент неравномерности распределения нагрузки на колеса, Кн=1,1[1]; mТ – масса тележки, mТ=3000кг; nк – число ходовых колес, nк = 4.
![]() .
.
Приводное колесо: К2РП-250-1 ОСТ 24.090-09-75
Еще о транспорте:
Определение КПД механизма
Коэффициент полезного действия механизма определяется по формуле: где: - работа сил полезного сопротивления за один оборот; работа сил полезного сопротивления и трения в винтовой паре за один оборот; работа сил полезного сопротивления в подшипнике. ...
Годовая производственная программа подразделений АТП
Годовая программа ежедневных обслуживаний автомобилей NЕО= Лиаз Марка а/м Марка а/м ПАЗ NЕО= NЕО= Годовая программа уборочно-моечных работ для грузовых автомобилей NУМР=(0,750,80)NЕО Годовая программа уборочно-моечных работ для легковых автомобилей и автобусов. NУМР=(1,101,15) NЕО Лиаз Марк ...
Меры безопасности при работе с генератором
Прежде чем производить какие-либо работы на системе зарядки, следует ознакомиться со следующими мерами безопасности: 1. Никогда не отключать батарею или регулятор напряжения, когда двигатель и генератор работают. 2. Никогда не замыкать клемму возбуждения генератор или закрепленный на ней кабель на ...
Главное Меню
- Главная
- Транспорт и туризм
- История развития кораблестроения
- Транспортная травма
- История спортивного автомобилестроения
- Двигатель автомобиля
- Пассажирские перевозки
- Информация