Расчет свободного хода поршня цилиндра при торможении вагона
F – площадь поперечного сечения, см2
Е – модуль упругости, Н/ см2
В случае внутреннего растяжения (сжатия) формула примет вид:
![]()
е – эксцентриситет приложения силы;
I– момент инерции сечения.
![]()
![]()
![]()
Деформация сжатия затяжки вертикальных рычагов:
![]()
где l – длина затяжки, l=119,5 см;
F – площадь поперечного сечения, F=18.75 см2.
![]()
Деформация растяжения тяги вагона:
![]()
F=3,8 см2; lдл=2910 мм; lкор=523 мм;
![]()
![]()
Деформация горизонтального рычага:
![]()
t*(h3-d23) 14(1403 – 453)
I= ¾¾¾¾¾¾ = ¾¾¾¾¾¾¾ = 3095021мм3
12

Деформация затяжки горизонтальных рычагов (внецентренное
растяжение):
![]()
где e – эксцентриситет, е = 65мм;
I – момент инерции сечения пластины.
I=t*h3/12= 25*1103/12=2772917мм4
F= t*h=25*110=2750; l=1070мм;
![]()
Деформация триангеля:
D1= [4,5*(L- а)2*Р]/3I1+2*l1*P/6I2*[(L-а)*4,5-L*0,8-((L-
f)/2)*0,8+4,5*L12)
Принимаем деформацию прогиба триангеля в процессе торможения 2 мм.
Определяем величину выхода штока от упругих деформаций.

По технологическим требованиям на проектирование ТРП вагона выход штока ТЦ от упругих деформаций не должен превышать 25% (<60мм) выхода штока при ПСТ или при 1-ой ступени торможения.
3.10.Приращение хода поршня Т. Ц. от сжатия возвратной пружины регулятора
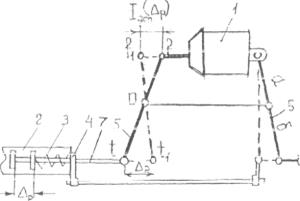
РисЗ.9Приращение хода поршня тормозного цилиндра в зависимости от величины сжатия пружины АРП
Поршень ТЦ совершает дополнительный ход в процессе торможения вагона за :чет возвратной пружины регулятора рычажной передачи. На рис. 3.9 приведена расчетная схема узла ТЦ 1 вагона для определения приращения хода его поршня от сжатия возвратной пружины 3 в регуляторе 2 при торможении.
При воздействии привода 4 на корпус регулятора 2.Под действием растягивающих усилий, развиваемых поршнем ТЦ 1 в процессе торможения, происходит сжатие тяговым стержнем 7 возвратной пружины 3 регулятора на величину АР (см Рис.3.9), что обуславливает поворот головного горизонтального рычага 5 и приращения хода поршня цилиндра. Зависимость перемещения поршня ТЦ и величины сжатия Dр возвратной пружины 3 установим; на основе подобия треугольников f1f0 и t1t0 откуда следует:
![]()
полная величина выхода штока:
![]()
Еще о транспорте:
Подбор оборудования
Оборудование для зоны ТО Наименование Тип, модель Габаритные размеры количество Общая площадь Агрегатно-моечная машина DP-250 600х500 мм 1 0.2769 Рабочий стол 630х505 мм 1 0.0585 Слесарный верстак 400х280 мм 1 Стеллаж для деталей 400х250мм 1 0.1974 Стол для контроля и сортировки деталей 1236х935 мм ...
Проектирование дорожной водопропускной трубы
На ПК 23+25 трасса лесовозной дороги пересекает реку, на пикетах 2+70, 69+50 она пересекает лог. В качестве расчетного принимаем ПК 69+50, так как на этом пикете будет самая большая водосборная площадь. Намечаем на карте границу водосборного бассейна и главный лог. 1. Ливневый район для Кировской о ...
Характеристика по конструктивным элементам
«АЗС-443» на правах собственности принадлежит обществу с ограниченной ответственностью «РН-Востокнефтепродукт», которое в качестве компании-подразделения входит в нефтяную компанию «Роснефть». «Роснефть» образована в соответствии с постановлением Правительства Российской Федерации от 29 сентября 19 ...
Главное Меню
- Главная
- Транспорт и туризм
- История развития кораблестроения
- Транспортная травма
- История спортивного автомобилестроения
- Двигатель автомобиля
- Пассажирские перевозки
- Информация