Основные технические требования к конструкции транспортных средств
Устранение блокирования колес СТС при торможении обеспечивается пропорциональностью тормозных сил силам сцепления колес с дорогой. Регулирование тормозных сил может осуществляться по статической весовой нагрузке, нормальным реакциям, замедлению ТС, скольжению колес. При этом используются различные регуляторы тормозных сил (ограничители, компенсаторы), ручные режимные краны и, наиболее эффективные, антиблокировочные системы. В них управление происходит по частоте вращения затормаживаемого колеса. Частота срабатывания пневматических систем составляет 3—10 Гц, проскальзывание в зоне контакта колеса с дорогой — 15—20%. Антиблокировочные системы обеспечивают торможение без блокирования колес при любых значениях коэффициента сцепления и уменьшают вероятность потери устойчивости и складывания СТС при торможении.
Для предупреждения складывания СТС при торможении за рубежом, помимо антиблокировочных систем, широко применяются специальные устройства, которые устанавливаются на подвижной состав, выпускаемый серийно. Устройства могут быть частью тормозных систем или самостоятельными элементами. Их действие основано на автоматическом повышении сопротивления повороту звеньев СТС относительно друг друга при торможении вплоть до полного блокирования. Эти устройства условно делят на три типа — фрикционные тормозные механизмы и муфты, механические фиксаторы, амортизирующие устройства.
Маневренность прицепного звена должна обеспечивать возможность эксплуатации СТС по дорогам общей сети и соответствующим специальным дорогам, а также в местах погрузки и разгрузки неделимых грузов.
Одним из основных факторов, определяющих маневренность СТС, является минимально возможная для его движения ширина проезжей часта дороги — габаритная полоса движения.
При повороте СТС ширина габаритной полосы движения увеличивается, в частности, за счет расхождения траекторий тягача и прицепного звена. Это расхождение тем выше, чем больше база прицепного звена и габаритная длина СТС в целом. Для улучшения маневренности прицепных звеньев в их конструкцию вводятся не только передние, но и задние управляемые колеса, а также системы управления, обеспечивающие минимальное расхождение траектории тягача и прицепных звеньев при движении на повороте.
По расположению управляемых колес различают три схемы прицепных звеньев (рис. 1.3).
Прицепные звенья управляемыми колесами (или поворотными тележками) оборудуют сравнительно простой системой управления. По такой схеме выполняются прицепы и полуприцепы, имеющие относительно небольшую базу и габаритную длину.
Прицепы с передними и задними управляемыми колесами (или поворотными тележками), а также полуприцепы с управляемыми колесами обладают улучшенной маневренностью.
Применяемые для этих звеньев системы управления обеспечивают согласованный поворот передних и задних колес в соответствии с поворотом дышла и совмещение колеи этих колес при движении по траекториям постоянной кривизны.
Прицепные звенья с передней и задней поворотными тележками, содержащими управляемые колеса, при равных размерах базы обладают лучшей маневренностью, чем прицепные звенья с управляемыми колесами.
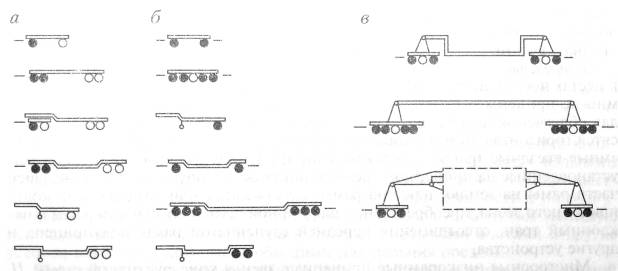
Рисунок - 1.3. Схемы расположения управляемых колес прицепных звеньев ТС:
а — прицепы с передними управляемыми колесами (поворотными тележками); б — прицепы с передними и задними управляемыми колесами (поворотными тележками) и полуприцепы с управляемыми колесами; в — прицепы с передними и задними поворотными тележками, снабженными управляемыми колесами
Еще о транспорте:
Проверка двигателя на надежность пуска
Время разгона механизма tп, с: , (3.30) где ωн – номинальная угловая скорость движения; δ – коэффициент учитывающий моменты инерции вращающихся масс привода, δ=1,2[1]; Iр –момент инерции ротора двигателя; Iгр момент инерции груза приведенный к валу двигателя: , (3.31) Тср.п – средне ...
Проверка обеспеченности вагона тормозными средствами
В соответствии с Правилами технической эксплуатации все грузовые и пассажирские вагоны, отправляемые в рейс, должны быть обеспечены автоматическими тормозами из расчета единой наименьшей тормозной силы [Вт], гарантирующей остановку поезда на заданном тормозном пути. Однако вычисление тормозных сил ...
Определение параметров конца сжатия
Давление газов в цилиндре: где n1 – показатель политропы сжатия n1 = 1,37 [1, стр. 9]. Температура газов в цилиндре: Определение параметров конца сгорания Теоретически необходимое количество воздуха для сгорания топлива: где gc, gн, g0 – элементарный состав топлива в долях кг, соответственно углеро ...
Главное Меню
- Главная
- Транспорт и туризм
- История развития кораблестроения
- Транспортная травма
- История спортивного автомобилестроения
- Двигатель автомобиля
- Пассажирские перевозки
- Информация