Определение параметров плавности хода машины на воздушной подушке
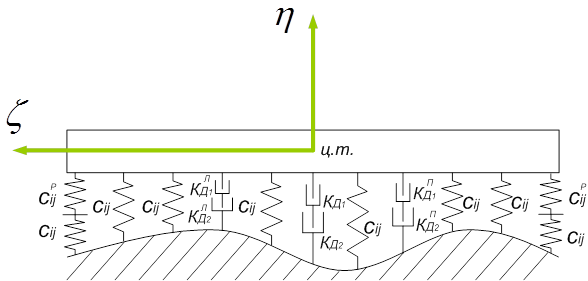
Рис. 2.5 Расчетная колебательная модель ВП
![]() – коэффициент жесткости ij секции ВП;
– коэффициент жесткости ij секции ВП;
![]() – коэффициент жесткости ресивера;
– коэффициент жесткости ресивера;
![]() – коэффициенты демпфирования вертикальных колебаний;
– коэффициенты демпфирования вертикальных колебаний;
![]() – коэффициенты демпфирования в «левом» и «правом» объемах, образующих демпфирующий момент сил;
– коэффициенты демпфирования в «левом» и «правом» объемах, образующих демпфирующий момент сил;
индексы «1» и «2» соответствуют контурам соплового устройства – наружному и внутреннему соплу.
Уравнения движения МВП
Описать движение машины, в том числе и колебательное, можно приняв подходящие в данном случае уравнения динамики твердого тела. Зададим обобщенные координаты, однозначно описывающие поведение машины: хц.т. и zц.т. – линейные координаты положения центра тяжести машины в пространстве координат OXYZ; ![]() и
и ![]() – угловые координаты осей
– угловые координаты осей ![]() и
и ![]() системы координат, связанной с центром тяжести машины относительно осей ОХ и ОZ неподвижной системы координат.
системы координат, связанной с центром тяжести машины относительно осей ОХ и ОZ неподвижной системы координат.
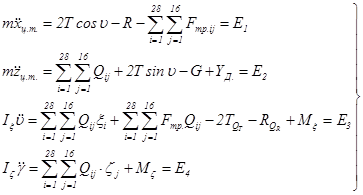 (2.21)
(2.21)
В правых частях уравнений системы (2.21) стоят внешние действующие силы. Многие из них зависят от внешних условий и поэтому переменны в течение времени. Проинтегрировать такого типа уравнения можно только одним из численных методов.
Воспользуемся методом Эйлера. Задача упрощается тем, что уравнения в системе не связаны, и их можно решать отдельно. Мы имеем дело с дифференциальными уравнениями второго порядка типа ![]() . Введем новые обозначения:
. Введем новые обозначения: ![]() и
и ![]() , следовательно,
, следовательно, ![]() и
и ![]() . Тогда исходное уравнение можно записать в виде
. Тогда исходное уравнение можно записать в виде ![]() . С учетом уравнения связи
. С учетом уравнения связи ![]() получим систему дифференциальных уравнений в матричном виде:
получим систему дифференциальных уравнений в матричном виде:
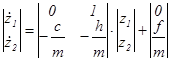 , либо
, либо ![]() .
.
Производные можно представить в виде ![]() , тогда
, тогда
![]() ,
,
где ![]() – значения матрицы z в моменты времени ti и ti+1 соответственно.
– значения матрицы z в моменты времени ti и ti+1 соответственно.
Выходит, что в каждый следующий момент времени вычислений
![]() .
.
То есть, получено уравнение, которое задает значение переменной в любой момент времени, исходя из значения переменной в предыдущий момент с учетом ее приращения. Такая методика вычисления хорошо реализуется на ЭВМ (приложение 4).
Еще о транспорте:
Расчет путевого развития станции
На участковых станциях для приема и отправления пассажирских поездов используется главные и специальные пассажирские приемо-отправочные пути. Так как к станции О примыкает 3 направления, то для приема пассажирских поездов принято 3 пути: 1 главный-для нечетных; 2 главный- для четных; 3 приемо-отпра ...
Дистанция сигнализации и связи
Техническая эксплуатация систем ЖАТ осуществляется дистанциями сигнализации и связи железных дорог (в дальнейшем - дистанции сигнализации и связи), которая на правах структурных подразделений вместе с дистанциями других служб входят в то отделение железной дороги на территории которого расположены ...
Выбор рабочих скоростей и передаточных чисел трансмиссии
Диапазон передач должен охватывать скорости и тяговые усилия, определяемые характером выполняемых трактором операций. Различают диапазоны скоростей: · замедленных или вспомогательных для получения особо низких скоростей движения, которые обуславливаются операциями технологического процесса; · основ ...
Главное Меню
- Главная
- Транспорт и туризм
- История развития кораблестроения
- Транспортная травма
- История спортивного автомобилестроения
- Двигатель автомобиля
- Пассажирские перевозки
- Информация